Шаговые двигатели не сильно отличаются от многих классических двигателей. Для управления шаговым двигателем необходимо подавать постоянное напряжение на обмотки в точной последовательности. Благодаря этому принципу, можно обеспечить точный угол поворота оси.
Более того, оставив напряжение питания на одной или нескольких обмотках двигателя, мы переводим двигатель в режим удержания. Шаговые двигатели получили широкое распространение в технике, к примеру, их можно найти в гибких дисководах, сканерах и принтерах. Существует несколько типов шаговых двигателей.
Типы шаговых двигателей
Существуют три основных типа шаговых двигателей:
- Двигатель с постоянным магнитом
- Двигатель с переменным магнитным сопротивлением
- Гибридный двигатель
Шаговый двигатель с постоянными магнитами
Шаговый двигатель с постоянными магнитами применяется наиболее часто в устройствах бытового назначения, нежели в промышленных устройствах. Это недорогой двигатель, имеющий низкий крутящий момент и низкую скорость вращения. Он идеально подходит для устройств компьютерной периферии.
Производство шагового двигателя с постоянными магнитами несложно и экономически оправдано, когда дело касается производства больших объемов. Однако из-за его относительной инертности, применение ограничено в устройствах, где требуется точное позиционирование по времени.
Шаговый двигатель с переменным магнитным сопротивлением

В шаговом двигателе с переменным магнитным сопротивлением нет постоянного магнита, и как результат этого — ротор вращается свободно, без остаточного крутящего момента. Этот тип двигателя часто используется в малогабаритных устройствах, например, в системах микро-позиционирования. Они не чувствительны к полярности тока и требуют систему управления отличную от других типов двигателей.
Гибридный шаговый двигатель

Гибридный двигатель, на сегодняшний день, является самым популярным двигателем в промышленной сфере. Его название происходит от того, что он сочетает в себе принципы работы двух других типов двигателя (с постоянными магнитами и переменным магнитным сопротивлением). Большинство гибридных двигателей имеют две фазы.

Как работает гибридный двигатель
Работу гибридного шагового двигателя легко понять, глядя на очень простую модель, которая производит 12 шагов за один оборот.
Ротор этой машины состоит из двух частей, каждая из которых имеет три зуба. Между двумя частями находится постоянный магнит, намагниченный в направлении оси ротора, создавая, таким образом, южный полюс на одной части детали, и северного полюса на другой. Статор состоит из трубки, имеющей четыре зуба внутри нее. Обмотки статора намотаны вокруг каждого такого зуба.
Когда ток протекает через одну из обмоток, ротор занимает одно из положений, показанных на рисунках. Это связано с тем что, постоянный магнит ротора пытается минимизировать магнитное сопротивление обмотки. Крутящий момент, что стремится держать ротор в этих положениях, как правило, небольшой и называется «релаксация крутящего момента». Ниже изображена схема работы двигателя с 12 шагами.

Если ток течет по двум обмоткам статора, результирующие полюса будут притягивать зубы обратной полярности на каждом конце ротора. Есть три устойчивых позиций для ротора, столько же, сколько количество зубьев на роторе. Момент, необходимый для перемещения ротора от его стабильного положения во вращательное движение называется «удержание крутящего момента»
Изменяя ток первой до второй обмотки (В), магнитное поле статора поворачивается на 90 градусов и притягивает новую пару полюсов ротора. В результате этого ротор поворачивается на 30 градусов, что соответствует полному шагу. Возвращение к первому набору обмоток статора, но с питанием обратной полярности, изменяет магнитное поле статора еще на 90 градусов, и ротор поворачивается на 30 градусов (С).
Наконец, второй набор обмоток работает в противоположном направлении, обеспечивая третье положение ротора (еще 30 градусов). Теперь мы можем вернуться снова к первому этапу (А), и после прохождения заново всех этих четырех этапов, ротор будет перемещен еще на один зуб.
Очевидно, что если полярность питания обмоток будет противоположной описанной, то вращение двигателя так же сменится на противоположное.
Режим полшага
Подавая питание поочередно на одну обмотку, а затем на две, ротор будет совершать вращение на 15 градусов в каждом шаге и таким образом количество шагов на один оборот увеличится в два раза. Этот режим называется режимом «полшага», и большинство промышленных устройств применяют этот режим. Даже если это иногда вызывает небольшую потерю крутящего момента, режим в полшага намного плавнее на низких скоростях и вызывает меньший резонанс в конце каждого шага.
 Когда шаговый двигатель находится под контролем в режиме «неполного шага», две фазы одновременно находятся под напряжением и крутящий момент обеспечивается на каждом шаге. В режиме полушага, питание чередуется между двумя фазами, и отдельной обмоткой, как показано на рисунке.
Когда шаговый двигатель находится под контролем в режиме «неполного шага», две фазы одновременно находятся под напряжением и крутящий момент обеспечивается на каждом шаге. В режиме полушага, питание чередуется между двумя фазами, и отдельной обмоткой, как показано на рисунке.

Биполярные и униполярные шаговые двигатели
От того какая у шагового двигателя форма обмоток, двигатели делятся на униполярные и биполярные. У биполярного двигателя по 1 обмотке в каждой фазе. Всего две обмотки и соответственно 4 вывода (рис. а). Для обеспечения вращения вала на эти обмотки должно подаваться напряжение с изменяемой полярностью. Поэтому для биполярного двигателя необходим полумостовой либо мостовой драйвер, снабженный двухполярным питанием.

Униполярный двигатель также как и биполярный, для каждой фазы имеет по одной обмотке, но каждая обмотка содержит отвод от середины. В связи с этим, путем переключения половинок обмотки шагового двигателя, появляется возможность менять направление магнитного поля.
В данном случае значительно упрощается структура драйвера двигателя. Он должен обладать всего лишь четырьмя силовыми ключами. Соответственно, в униполярном двигателе применяется иной метод изменения направления магнитного поля. Отводы обмоток зачастую объединяются внутри двигателя, вследствие этого данный тип двигателя может обладать пятью или шестью проводами (рис. б).
Порой униполярные двигатели снабжаются четырьмя обмотками, каждая из которых содержит собственные выводы – то есть их всего восемь (рис. в). При определенном соединении этих обмоток подобный шаговый двигатель возможно использовать как биполярный либо униполярный. Кстати, униполярный двигатель, имеющий две обмотки с отводами по середине, возможно использовать и как биполярный. В этом случае провода, идущие от середины обмоток не используются.
Управление шаговым двигателем
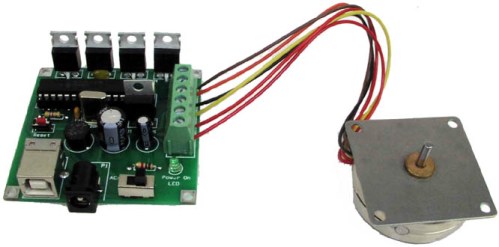
В качестве примера управления шаговым двигателем возьмем униполярный шаговый двигатель ШД-1ЕМ, имеющий характеристики: количество шагов - 200/об., ток обмотки – 0,5А, мощность - 12 Ватт.
Драйвером, управляющим обмотками шагового двигателя выберем микросхему ULN2003A. Эта уникальная микросхема, не что иное, как транзисторная сборка по схеме Дарлингтона с открытым коллектором, снабженная диодом, защищающим цепь питания нагрузки. ULN2003A имеет семь каналов управления с током нагрузки 500мА каждый.
 Входы микросхемы ULN2003A можно напрямую подключать к выходам цифровых микросхем, поскольку она имеет резисторы, подключенные к базам транзисторов. Еще одним немаловажным моментом является то, что выходы ULN2003A снабжены диодами, которые защищают микросхему от индукционных выбросов в момент коммутации обмоток шагового двигателя.
Входы микросхемы ULN2003A можно напрямую подключать к выходам цифровых микросхем, поскольку она имеет резисторы, подключенные к базам транзисторов. Еще одним немаловажным моментом является то, что выходы ULN2003A снабжены диодами, которые защищают микросхему от индукционных выбросов в момент коммутации обмоток шагового двигателя.
 Вывод 9 микросхемы ULN2003A подведен к источнику питания через стабилитрон, который защищает схему от ЭДС самоиндукции, появляющейся в момент выключения блока питания схемы. Управление шаговым двигателем
производится с помощью компьютера через LPT порт при помощи программы:
Вывод 9 микросхемы ULN2003A подведен к источнику питания через стабилитрон, который защищает схему от ЭДС самоиндукции, появляющейся в момент выключения блока питания схемы. Управление шаговым двигателем
производится с помощью компьютера через LPT порт при помощи программы:

(скачено: 1 845)
Шаговые двигатели применяются сегодня во многих промышленных сферах. Двигатели данного типа отличаются тем, что позволяют добиться высокой точности позиционирования рабочего органа, по сравнению с другими типами двигателей. Очевидно, что для работы шагового двигателя требуется точное автоматическое управление. Именно этой для этой цели и служат контроллеры шаговых двигателей , обеспечивающие бесперебойную и точную работу электроприводов различного назначения.
Грубо принцип работы шагового двигателя можно описать так. Каждый полный оборот ротора шагового двигателя состоит из нескольких шагов. Подавляющее большинство шаговых двигателей рассчитаны на шаг в 1,8 градуса, и на полный оборот приходится 200 шагов. Привод меняет положение на шаг при подаче на определенную обмотку статора напряжения питания. Направление вращения зависит от направления тока в обмотке.
Следующий шаг - выключается первая обмотка, питание подается на вторую и так далее, в итоге после отработки каждой обмотки ротор совершит полный оборот. Но это грубое описание, на деле алгоритмы несколько сложнее, и об этом будет рассказано далее.

Алгоритмы управления шаговым двигателем
Управление шаговым двигателем может быть реализовано по одному из четырех основных алгоритмов: попеременное включение фаз, управление с перекрытием фаз, полушаговое управление или микрошаговое управление.
В первом случае в каждый момент времени питание получает только одна из фаз, и точки равновесия ротора двигателя на каждом шагу совпадают с ключевыми точками равновесия - полюса отчетливо выражены.
Управление с перекрытием фаз позволяет ротору получить шаги к позициям между полюсными выступами статора, что увеличивает вращающий момент на 40% по сравнению с управлением без перекрытия фаз. Угол шага сохраняется, однако положение фиксации смещено - оно находится между полюсными выступами статора. Эти первые два алгоритма применяются в электротехническом оборудовании, где очень высокая точность не требуется.
Полушаговое управление - комбинация первых двух алгоритмов: через шаг питание получают то одна фаза (обмотка), то две. Размер шага уменьшается вдвое, точность позиционирования получается более высокой, снижается вероятность наступления механического резонанса в двигателе.
Наконец, микрошаговый режим. Здесь ток в фазах меняется по величине так, чтобы положение фиксации ротора на шаг приходилось бы на точку между полюсами, причем, в зависимости от соотношения величин токов в одновременно включенных фазах, таких шагов можно получить несколько. Регулируя соотношение токов, настраивая количество рабочих соотношений, получают микрошаги - наиболее точное позиционирование ротора.
Подробнее смотрите со схемами здесь:
Чтобы выбранный алгоритм реализовать практически, применяют драйвер шагового двигателя
. Драйвер содержит в себе силовую часть и контроллер.
Силовая часть драйвера - это , задача которого преобразовать подаваемые на фазы импульсы тока в перемещения ротора: один импульс - один точный шаг или микрошаг.
Направление и величина тока - направление и величина шага. То есть задача силовой части - подать ток определенной величины и направления в соответствующую обмотку статора, удержать этот ток в течение некоторого времени, а также осуществлять быстрое включение и выключение токов, чтобы скоростные и мощностные характеристики привода соответствовали бы поставленной задаче.
Чем более совершенна силовая часть драйвера, тем больший момент можно получить на валу. Вообще, тренд прогресса в совершенствовании шаговых двигателей и их драйверов - получить от двигателей малых габаритов значительный рабочий момент, высокую точность, и сохранить при этом высокий КПД.
Контроллер шагового двигателя
Контроллер шагового двигателя - интеллектуальная часть системы, которая обычно изготовлена на базе микроконтроллера с возможностью перепрограммирования. Именно контроллер отвечает за то, в какой момент, на какую обмотку, на какое время, и какой величины ток будет подан. Контроллер управляет работой силовой части драйвера.
Продвинутые контроллеры подключаются к ПК, и могут регулироваться в режиме реального времени при помощи ПК. Возможность многократного перепрограммирования микроконтроллера избавляет пользователя от необходимости каждый раз при корректировке задачи приобретать новый контроллер - достаточно перенастроить уже имеющийся, в этом гибкость, контроллер можно легко переориентировать программно на выполнение новых функций.
На рынке сегодня представлены широкие модельные ряды контроллеров шаговых двигателей от различных производителей, отличающиеся возможностями расширения функций. Программируемые контроллеры предполагают запись программы, а некоторые включают в себя программируемые логические блоки, при помощи которых возможна гибкая настройка алгоритма управления шаговым двигателем под тот или иной технологический процесс.
Возможности контроллеров
Управление шаговым двигателем при помощи контроллера позволяет достичь высокой точности вплоть до 20000 микрошагов на оборот. Причем управление может осуществляться как напрямую с компьютера, так и за счет прошитой в устройство программы или по программе с карты памяти. Если параметры в ходе выполнения задачи меняются, то компьютер может опрашивать датчики, отслеживать меняющиеся параметры и оперативно изменять режим работы шагового двигателя.
Есть в продаже блоки управления шаговым двигателем, к которым подключаются: источник тока, кнопки управления, источник тактового сигнала, потенциометр для настройки шага и т. д. Такие блоки позволяют быстро интегрировать шаговый двигатель в оборудование для выполнения повторяющихся цикличных задач с ручным или автоматическим управлением. Возможность синхронизации с внешними устройствами и поддержка автоматического включения, выключения и управления - несомненное достоинство блока управления шаговым двигателем.
Блок может управляться с компьютера напрямую, если, например, требуется воспроизвести программу , или в ручном режиме без дополнительного внешнего управления, то есть автономно, когда направление вращения вала шагового двигателя устанавливается датчиком реверса, а скорость регулируется потенциометром. Блок управления подбирается по параметрам к шаговому двигателю, который предполагается использовать.
В зависимости от характера поставленной цели выбирают способ управления шаговым двигателем. Если необходимо настроить простое управление маломощным электроприводом, когда в каждый момент времени один импульс подается на одну катушку статора: на полный оборот нужно, скажем, 48 шагов, и ротор будет перемещаться на 7,5 градусов при каждом шаге. Режим одиночных импульсов в этом случае подойдет.
Для достижения более высокого вращающего момента применяют двойной импульс - в две соседние катушки подается одновременно по импульсу. И если для полного оборота нужно 48 шагов, то опять же нужно 48 таких двойных импульсов, каждый приведет к шагу в 7,5 градусов но с на 40% большим моментом нежели в режиме одиночных импульсов. Скомбинировав оба способа можно получить 96 импульсов разделив шаги - получится 3,75 градуса на шаг - это комбинированный режим управления (полушаговый).
Схема драйвера униполярного шагового двигателя
, описанная в данной статье, реализует следующие задачи:
управление 4-фазовым униполярным шаговым двигателем.
обеспечивает плавную регулировку скорости вращения и изменение направления вращения.
выполняет функцию остановки двигателя.
Ниже представлена принципиальная схема драйвера шагового двигателя. Драйвер построен с использованием трех микросхем 4000 серии и четырех силовых MOSFET транзисторов.

Схема тактируется генератором прямоугольных импульсов, построенного на логических элементах 2И-НЕ с триггером Шмитта на выходе. Рабочая частота генератора определяется общим сопротивлением PR1 + R2 и емкостью конденсатора С1, и может быть изменена в широком диапазоне с помощью PR1.
Фрагмент схемы на элементах EXOR и J-K триггере создает счетчик по модулю 4, с тактами высокого уровня. Переключатель SB1 (JP1) предназначен для изменения направления работы счетчика, а, следовательно, для изменения направления вращения шагового двигателя. С помощью переключателя SB2 (JP2) можно запускать и останавливать двигатель.
Управление катушками 4-фазного шагового двигателя осуществляется с помощью четырех MOSFET транзисторов (VT1…VT4). Использование в данной схеме транзисторов высокой мощности типа BUZ11 — это решение, гарантирующее надлежащую работу двигателя высокой мощности.
Ниже показаны формы сигналов на разъеме Х2, к которому подключаются обмотки шагового двигателя.

Драйвер собран на печатной плате, рисунок которой приведен ниже. Монтаж следует начать с установки резисторов, панельки под микросхемы и закончить разъемами и силовыми транзисторами.

Разъемы JP1 и JP2 имеют ту же функцию, что и нажатие кнопки SB1 и SB2, так что вы можете подключить к ним кнопки и вынести их за пределы платы.
Печатная плата разработана таким образом, что вы можете установить транзисторы на общий радиатор, предварительно изолировав их слюдяными или силиконовыми прокладками.
После сборки необходимо тщательно проверить плату на предмет короткого замыкания дорожек. Драйвер, собранный из исправных деталей не требует настройки и начинает работать сразу.

Следует, упомянуть о способе подключения питания и обмоток двигателя к плате драйвера. В случае питания схемы управления и двигателя тем же напряжением, которое находится в диапазоне от 5…15 В, и ток потребления не превышает 1 А, то необходимо установить перемычку JP3 и питание подать к разъему VDD.
Если параметры питания шагового двигателя не находится в пределах напряжения питания схемы драйвера, то необходимо снять перемычку JP3, и к разъему VDD подвести напряжение питания от 5…15 В, а к разъему X2 подать питание в соответствии с параметрами шагового двигателя.
(8,5 Kb, скачано: 1 486)
Шаг 1.
Нам потребуется…
От старого сканера:
- 1 шаговый двигатель
- 1 микросхема ULN2003
- 2 стальных прута
Для корпуса: - 1 картонная коробка
Инструменты:
- Клеевой пистолет
- Кусачки
- Ножницы
- Принадлежности для пайки
- Краска
Для контроллера:
- 1 разъем DB-25 - провод
- 1 цилиндрическое гнездо для питания постоянного тока Для испытательного стенда
- 1 стержень с резьбой
- 1 подходящая под стержень гайка - разные шайбы и шурупы - куски древесины
Для управляющего компьютера:
- 1 старый компьютер (или ноутбук)
- 1 копия TurboCNC (отсюда)
Шаг 2.
Берем детали от старого сканера. Чтобы построить собственный ЧПУ контроллер нужно для начала извлечь из сканера шаговый двигатель и плату управления. Здесь не приведено никаких фотографий, потому что каждый сканер выглядит по-своему, но обычно нужно просто снять стекло и вывернуть несколько винтов. Кроме двигателя и платы можно оставить еще металлические стержни, которые потребуются для тестирования шагового двигателя.
Шаг 3.
Извлекаем микросхему из платы управления Теперь нужно найти на плате управления шаговым двигателем микросхему ULN2003. Если вы не смогли обнаружить ее на своем устройстве, ULN2003 можно купить отдельно. Если она есть, ее нужно выпаять. Это потребует некоторого умения, но не так уж сложно. Сначала при помощи отсоса удалите как можно больше припоя. После этого осторожно просуньте под микросхему конец отвертки. Осторожно прикоснитесь концом паяльника к каждому выводу, продолжая при этом нажимать на отвертку.
Шаг 4.
Пайка Теперь нам нужно припаять микросхему на макетную плату. Припаяйте к плате все выводы микросхемы. На показанной здесь макетной плате имеется две шины электропитания, поэтому положительный вывод ULN2003 (смотрите схему и на рисунке ниже) припаивается к одной из них, а отрицательный - к другой. Теперь, нужно соединить вывод 2 коннектора параллельного порта с выводом 1 ULN2003. Вывод 3 коннектора параллельного порта соединяется с выводом 2 ULN2003, вывод 4 - с выводом 3 ULN2003 и вывод 5 - с выводом 4 ULN2003. Теперь вывод 25 параллельного порта припаивается к отрицательной шине питания. Далее к управляющему устройству припаивается мотор. Делать это придется путем проб и ошибок. Можно просто припаять провода так, чтобы потом цеплять на них крокодилы. Еще можно использовать клеммы с винтовым креплением или что-нибудь подобное. Просто припаяйте провода к выводам 16, 15, 14 и 13 микросхемы ULN2003. Теперь припаяйте провод (желательно черный) к положительной шине питания. Управляющее устройство почти готово. Наконец, подсоедините к шинам электропитания на макетной плате цилиндрическое гнездо для питания постоянного тока. Чтобы провода не могли отломаться, их закрепляют клеем из пистолета.







Шаг 5.
Установка программного обеспечения Теперь о программном обеспечении. Единственная вещь, которая точно будет работать с вашим новым устройством - это Turbo CNC. Скачайте его . Распакуйте архив и запишите на CD. Теперь, на компьютере, который вы собираетесь использовать для управления, перейдите на диск C:// и создайте в корне папку "tcnc". Затем, скопируйте файлы с CD в новую папку. Закройте все окна. Вы только что установили Turbo CNC.





Шаг 6.
Настройка программного обеспечения Перезагрузите компьютер чтобы перейти к работе в MS-DOS. В командной строке наберите "C: cncTURBOCNC". Иногда лучше использовать загрузочный диск, тогда копия TURBOCNC помещается на него и нужно набирать, соответственно "A: cncTURBOCNC". Возникнет экран, похожий на изображенный на рис. 3. Нажмите пробел. Теперь вы находитесь в главном меню программы. Нажмите F1, и при помощи клавиш со стрелками выберите меню "Configure". При помощи клавиш со стрелками выберите "number of axis". Нажмите Enter. Введите количество осей, которые будут использоваться. Поскольку у нас только один мотор, выбираем "1". Нажмите Enter чтобы продолжить. Снова нажмите F1 и в меню "Configure" выберите пункт "Configure axes", затем дважды нажмите Enter.
Появится следующий экран. Нажимайте Tab пока не перейдете к ячейке "Drive Type". При помощи стрелки вниз выберите пункт "Phase". Снова при помощи Tab выберите ячейку "Scale". Чтобы использовать калькулятор, нам нужно найти число шагов, которые двигатель делает за один оборот. Зная номер модели двигателя, можно установить на сколько градусов он поворачивается за один шаг. Чтобы найти число шагов, которые двигатель делает за один оборот, теперь нужно поделить 360 на число градусов за один шаг. Например, если мотор поворачивается за один шаг на 7,5 градусов, 360 поделить на 7,5 получится 48. Число, которое получится у вас, забейте в калькулятор шкалы (scale calculator).
Остальные настройки оставьте как есть. Нажмите OK, и скопируйте число в ячейке Scale в такую же ячейку на другом компьютере. В ячейке Acceleration установите значение 20, поскольку установленных по умолчанию 2000 слишком много для нашей системы. Начальную скорость установите равной 20, а максимальную - 175. Нажимайте Tab пока не дойдете до пункта "Last Phase". Установите в нем значение 4. Нажимайте Tab пока не дойдете до первого ряда иксов.
Скопируйте следующее в четыре первых ячейки:
1000XXXXXXXX
0100XXXXXXXX
0010XXXXXXXX
0001XXXXXXXX
Остальные ячейки оставьте без изменений. Выберите OK. Теперь вы настроили программное обеспечение.









Шаг 7.
Строим тестовый вал Следующим этапом работы будет сборка простого вала для тестовой системы. Отрежьте 3 бруска дерева и скрепите их друг с другом. Чтобы получить ровные отверстия проведите на поверхности дерева ровную линию. Просверлите на линии два отверстия. Еще 1 отверстие просверлите посередине ниже первых двух. Отсоедините бруски. Через два отверстия, что находятся на одной линии, проденьте стальные пруты. Чтобы закрепить пруты воспользуйтесь небольшими шурупами. Проденьте пруты сквозь второй брусок. На последнем бруске закрепите двигатель. Не имеет значения, как вы это сделаете, будьте изобретательны.
Чтобы закрепить двигатель, имевшийся в наличии, использовали два отрезка стержня с резьбой 1/8. Брусок с прикрепленным двигателем надевается на свободный конец стальных прутов. Снова закрепите их шурупами. Сквозь третье отверстие на первом бруске проденьте стержень с резьбой. Заверните на стержне гайку. Проденьте стержень сквозь отверстие во втором бруске. Поворачивайте стержень до тех пор, пока он не пройдет сквозь все отверстия и не дойдет до вала двигателя. Соедините вал двигателя и стержень при помощи шланга и зажимов из проволоки. На втором бруске гайка удерживается при помощи дополнительных гаек и винтов. В завершение, отрежьте брусок дерева для подставки. Привинтите ее шурупами ко второму бруску. Проверьте, установлена ли подставка ровно на поверхности. Регулировать положение подставки на поверхности можно при помощи дополнительных винтов и гаек. Так делается вал для тестовой системы.










Шаг 8.
Подсоединяем и тестируем двигатель Теперь нужно соединить двигатель с контроллером. Во-первых, соедините общий провод (смотрите документацию к двигателю) с проводом, который был припаян к положительной шине питания. Другие четыре провода соединяются путем проб и ошибок. Соедините их все, и затем меняйте порядок соединения, если ваш двигатель делает два шага вперед и один назад или что-либо подобное. Для проведения тестирования подключите 12 В 350 мА источник питания постоянного тока в цилиндрическое гнездо. Затем соедините разъем DB25 c компьютером. В TurboCNC проверьте как соединен двигатель. В результате тестирования и проверки правильного подсоединения двигателя у вас должен получиться полностью работоспособный вал. Чтобы проверить масштабирование вашего устройства, прикрепите к нему маркер и запустите тестовую программу. Измерьте получившуюся линию. Если длина линии составляет порядка 2-3 см, устройство работает правильно. В противном случае, проверьте вычисления в шаге 6. Если у вас все получилось, поздравляем, самое трудное уже позади.


Шаг 9.
Изготовление корпуса
Часть 1
Изготовление корпуса - это завершительный этап. Присоединимся к защитникам природы и сделаем его из вторсырья. Тем более, что контроллер у нас тоже не с магазинных полок. У представленного вашему вниманию образца плата имеет размер 5 на 7,5 см, поэтому корпус будет размером 7,5 на 10 на 5 см, чтобы оставить достаточно места для проводов. Из картонной коробки вырезаем стенки. Вырезаем 2 прямоугольника размером 7,5 на 10 см, еще 2 размером 5 на 10 см и еще 2 размером 7,5 на 5 см (см. рисунки). В них нужно вырезать отверстия для разъемов. Обведите контуры разъема параллельного порта на одной из 5 х 10 стенок. На этой же стенке обведите контуры цилиндрического гнезда для питания постоянного тока. Вырежьте по контурам оба отверстия. То, что вы будете делать дальше, зависит от того, припаивали ли вы к проводам двигателя разъемы. Если да, то закрепите их снаружи второй пока пустой стенки размером 5 х 10. Если нет, проткните в стенке 5 отверстий для проводов. При помощи клеевого пистолета соедините все стенки вместе (кроме верхней, см. рисунки). Корпус можно покрасить.













Шаг 10.
Изготовление корпуса
Часть 2
Теперь нужно приклеить все компоненты внутрь корпуса. Убедитесь, что на разъемы попало достаточно много клея, потому что они будут подвергаться большим нагрузкам. Чтобы коробка оставалась закрытой, нужно сделать защелки. Из пенопласта вырежьте пару ушек. Затем вырежьте пару полос и четыре небольших квадратика. Приклейте по два квадратика к каждой из полос как показано на рисунке. Приклейте ушки по обеим сторонам корпуса. Сверху коробки приклейте полосы. Этим завершается изготовление корпуса.

Шаг 11.
Возможные применения и заключение Этот контроллер можно применять как: - ЧПУ устройство - плоттер - или любую другую вещь, которой нужно точное управление движением. - добавление- Здесь приведены схема и инструкции по изготовлению контроллера с тремя осями. Чтобы настроить программное обеспечение, следуйте вышеуказанным шагам, но в поле "number of axis" введите 3.
зарегистрироваться .![]() В ассортименте полупроводниковых компонентов производства компании Texas Instruments
широко представлены микросхемы драйверов для управления всеми типами электродвигателей
, которые, совершенствуясь, находят все более широкое применение в самом различном оборудовании. Компания предлагает решения для создания приводов, работающих в широком диапазоне токов и напряжений, обеспечивающих надежную и удобную эксплуатацию коллекторных
, бесколлекторных
и шаговых двигателей
с полным комплексом защит по току, напряжению и температуре.
В ассортименте полупроводниковых компонентов производства компании Texas Instruments
широко представлены микросхемы драйверов для управления всеми типами электродвигателей
, которые, совершенствуясь, находят все более широкое применение в самом различном оборудовании. Компания предлагает решения для создания приводов, работающих в широком диапазоне токов и напряжений, обеспечивающих надежную и удобную эксплуатацию коллекторных
, бесколлекторных
и шаговых двигателей
с полным комплексом защит по току, напряжению и температуре.
Электродвигатели находят широчайшее применение в современном высокотехнологическом укладе жизни. Этот тип электромеханического привода по-прежнему является одним из наиболее распространенных и востребованных. Электродвигатели самого разного назначения являются одной из основных составляющих любого производства, повсеместно используются в офисной и домашней технике, в системах мониторинга и управления зданий и объектов. Очень широкое распространение электродвигатели нашли на современном транспорте. Еще более впечатляющее будущее уготовано электродвигателям в электромобилях и роботах.
С развитием технологий традиционные двигатели совершенствуются и находят все новые области применения. Современные высокоточные станки и робототехника немыслимы без электродвигателей с интеллектуальными системами управления. На земле, в воздухе и под водой электродвигатели остаются широко востребованным преобразователем электрической энергии в механическую.
Типы электродвигателей, способы управления и возникающие сложности
Впервые созданный в 1834 году русским ученым Якоби преобразователь электрической энергии во вращательное движение получил название электродвигатель. С тех пор он был серьезно усовершенствован – появилось множество новых вариантов, но использованные при его создании принципы электромагнетизма по-прежнему являются основой всех модификаций современных электродвигателей.
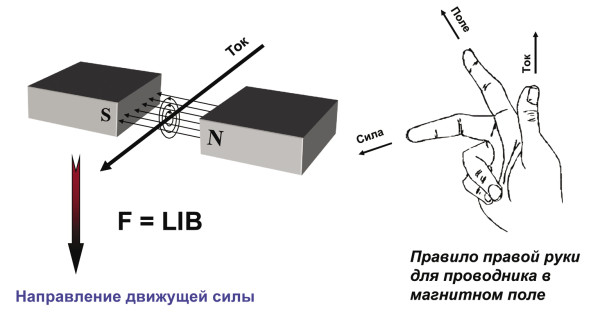
Проводник с проходящим по нему током (рисунок 1) создает вокруг себя магнитное поле, интенсивность (магнитная индукция) которого пропорциональна количеству витков, в случае использования катушки (N), и величине проходящего по ней тока (I), где, В – вектор магнитной индукции, К – магнитная постоянная, N – число витков, I – сила тока.

Изменение направления тока влияет и на направление магнитного поля проводника.
При этом на помещенный во внешнее магнитное поле проводник с током действует сила Лоренца, вызывающая его вращательное перемещение. Направление вращения легко определяется с помощью известного правила правой руки для проводника с током в магнитном поле (рисунок 2). Сила (F), действующая на проводник в магнитном поле, равна произведению силы тока (I) в проводнике на вектор магнитной индукции поля (B) и длину проводника (L). F = LIB.
Коллекторные двигатели
Коллекторные двигатели постоянного тока (Brushed DC или BDC, по терминологии TI) сегодня относятся к одним из наиболее распространенных механизмов электромагнитного вращения.
В магнитном поле собранного из постоянных магнитов статора вращается многосекционный ротор с катушками, которые попарно и попеременно подключаются через коммутируемые коллекторные ламели на оси ротора (рисунок 3). Выбор пары активируемых катушек выполняется на основании закона Лоренца в соответствии с правилом Буравчика. Источник тока всегда подключен к катушкам, силовые линии магнитного поля которых смещены на угол, близкий к 90°, относительно магнитного поля статора.

Электродвигатели подобного типа часто используют статор с постоянными магнитами. Они позволяют легко регулировать скорость вращения и отличаются невысокой стоимостью.
Также широко используется вариант 2-обмоточного электродвигателя подобного типа, но со статорной обмоткой вместо постоянного магнита. Такие модели обладают большим пусковым моментом и могут работать не только на постоянном, но и на переменном токе. Электродвигатели подобного типа почти повсеместно используются в различной бытовой технике.
К недостаткам этой конструкции BDC стоит отнести износ щеточно-коллекторного узла в процессе эксплуатации. Кроме того, из-за искрообразования при коммутации отдельных обмоток ротора отмечается повышенный уровень электромагнитных помех, что не позволяет использовать такие двигатели во взрывоопасных средах.
Особенностью двигателей BDC также является повышенный нагрев ротора, охлаждение которого затруднено в силу конструктивных особенностей двигателя.
Достоинства коллекторных двигателей:
- малая стоимость;
- простая система управления;
- 2-обмоточные коллекторные двигатели, обладающие высоким крутящим моментом и способные работать на постоянном и переменном токе.
Особенности эксплуатации коллекторных двигателей:
- щетки требуют периодического обслуживания, понижают надежность двигателя;
- в процессе коммутации возникают электрические искры и электромагнитные помехи;
- затруднен отвод тепла от перегревающегося ротора.
Бесколлекторные двигатели
Несколько менее распространенными среди двигателей постоянного тока являются модели с бесщеточной конструкцией (BrushLess DC или BLDC), использующие ротор с постоянными магнитами, которые вращаются между электромагнитами статора (рисунок 4). Коммутация тока здесь выполняется электронным способом. Переключение обмоток электромагнитов статора заставляет магнитное поле ротора следовать за его полем.
Текущее положение ротора обычно контролируется энкодерами или датчиком на основе эффекта Холла, либо применяется технология с измерением напряжения противо-ЭДС на обмотках без использования в этом случае отдельного датчика положения ротора (SensorLess).
Коммутация тока обмоток статора выполняется с помощью электронных ключей (вентилей). Именно поэтому бесколлекторные двигатели BLDC часто называют «вентильными». Очередность подключения пары обмоток двигателя происходит в зависимости от текущего положения ротора.
Принцип работы BLDC основан на том, что контроллер коммутирует обмотки статора так, чтобы вектор магнитного поля статора всегда был сдвинут на угол, близкий к 90° или -90° относительно вектора магнитного поля ротора. Вращающееся при переключении магнитное поле заставляет перемещаться вслед за ним ротор с постоянными магнитами.
При использовании трехфазного сигнала управления подключенными к источнику тока всегда оказываются только две пары обмоток, а одна – отключена. В результате последовательно используется комбинация из шести состояний (рисунок 5).

Электродвигатели без датчиков положения ротора отличаются повышенной технологичностью процесса изготовления и более низкой стоимостью. Подобная конструкция упрощает герметизацию внешних подключаемых выводов.
В качестве датчиков скорости и положения ротора в BLDC могут использоваться датчики Холла, которые отличаются небольшой стоимостью, но также и достаточно невысоким разрешением. Повышенное разрешение обеспечивают вращающиеся трансформаторы (резольверы). Они отличаются высокой стоимостью и требуют использования ЦАП, так как выходной сигнал у них синусоидальный. Высоким разрешением, но пониженной надежностью, обладают оптические датчики. На рисунке 6 представлены выходные сигналы датчиков разного типа при вращении ротора двигателя.

Преимущества двигателей BLDC:
- высокая эффективность;
- отсутствие щеток, обеспечивающее повышенную надежность, снижение затраты на обслуживание;
- линейность тока/крутящего момента;
- упрощенный отвод тепла.
Особенности применения двигателей BLDC:
- более сложная система управления с обратной связью по положению ротора;
- пульсации крутящего момента.
Шаговые двигатели
Шаговые двигатели (ШД) получили достаточно широкое распространение в системах автоматики и управления. Они являются еще одним типом бесколлекторных двигателей постоянного тока. Конструктивно ШД состоят из статора, на котором размещены обмотки возбуждения, и ротора, выполненного из магнитных материалов. Шаговые двигатели с магнитным ротором позволяют обеспечить больший крутящий момент и жесткую фиксацию ротора при обесточенных обмотках.
В процессе вращения ротор ШД перемещается шагами под управлением подаваемых на обмотки статора импульсов питания. Шаговые двигатели удобны для использования в приводах машин и механизмов, работающих в старт-стопном режиме. Их диапазон перемещения задается определенной последовательностью электрических импульсов. Такие двигатели отличаются высокой точностью, не требуют датчиков и цепей обратной связи. Угол поворота ротора зависит от количества поданных импульсов управления. Точность позиционирования (величина шага) зависит от конструктивных особенностей двигателя, схемы подключения обмоток и последовательности подаваемых на них управляющих импульсов.
В зависимости от конфигурации схемы подключения обмоток шаговые двигатели делятся на биполярные и униполярные. Биполярный двигатель имеет в каждой из двух фаз единую обмотку для обоих полюсов статора, которая для изменения направления магнитного поля должна переполюсовываться драйвером. Биполярный двигатель имеет две обмотки и, соответственно, четыре вывода. Для управления таким ШД требуется мостовой драйвер или полумостовая схема с 2-полярным питанием. При биполярном управлении одновременно работают две обмотки и крутящий момент примерно на 40% больше. На рисунке 7 представлена последовательность сигналов управления при вращении биполярного ШД.

Униполярный двигатель использует в каждой фазе одну обмотку со средним выводом и позволяет использовать более простую схему управления с одним ключом на каждую из четырех полуобмоток.
Четырех обмоточные ШД могут использоваться как в биполярной, так и в униполярной конфигурации.
При протекании тока по одной из катушек ротор стремится изменить положение так, чтобы противоположные полюса ротора и статора установились друг против друга. Для непрерывного вращения ротора катушки попеременно переключают.
На практике используются разные способы подачи питания на четыре обмотки статора. Чаще всего применяют попарное подключение с полношаговым или полушаговым режимом работы. В полношаговом режиме ротор с двумя полюсами, вращающийся в переключаемом магнитном поле двух пар катушек, может занимать четыре положения (рисунок 8).

Получить удвоенную точность позиционирования и восемь позиций позволяет полушаговый режим работы (рисунок 9). Для его реализации добавляется промежуточный шаг с одновременной запиткой всех четырех катушек.

Значительно увеличить количество промежуточных положений и точность позиционирования позволяет режим микрошага. Идея микрошага заключается в подаче на обмотки шагового двигателя вместо импульсов управления непрерывного сигнала, напоминающего по форме ступенчатую синусоиду (рисунок 10). Полный шаг в этом случае делится на маленькие микрошаги, а вращение становится более плавным. Режим микрошага позволяет получить наиболее точное позиционирование. Кроме того, в этом режиме значительно снижается присущая шаговым двигателям вибрация корпуса.

Достоинства шаговых двигателей:
- невысокая стоимость благодаря отсутствию схем контроля скорости вращения и позиционирования;
- высокая точность позиционирования;
- широкий диапазон скоростей вращения;
- простой интерфейс управления с цифровыми контроллерами;
- очень высокая надежность;
- хороший удерживающий момент.
Особенности применения шаговых двигателей:
- ШД присуще явление резонанса;
- из-за отсутствия обратной связи возможна потеря контроля положения;
- потребление энергии не уменьшается даже при работе без нагрузки;
- затруднена работа на очень высоких скоростях;
- невысокая удельная мощность;
- достаточно сложная схема управления.
Традиционные решения для управления электродвигателями
Современная прецизионная система управления электродвигателем постоянного тока включает в себя микроконтроллер для обработки данных и блок управления питанием обмоток двигателя, часто называемый драйвером. В состав драйвера входит логическая схема для преобразования кодированных посылок в цифровые управляющие сигналы, из которых в блоке Gate Driver формируются аналоговые сигналы для управления силовыми ключами на основе полевых транзисторов (FET). FET могут входить в состав драйвера или размещаться в отдельном блоке. Кроме того, в состав драйвера входят схемы защиты силовых цепей и цепи обратной связи для контроля работы двигателя.
На рисунке 11 представлены варианты блок-схем для интегрированного и предварительного драйверов. Каждое из решений имеет свои преимущества и особенности. Предварительный драйвер (Pre-Driver) имеет значительно облеченный температурный режим, позволяет выбирать внешние силовые ключи в соответствии с мощностью подключаемого двигателя. Полнофункциональный интегрированный драйвер позволяет создавать более компактные системы управления, минимизирует внешние соединения, но значительно усложняет обеспечение необходимого температурного режима.

Так, у интегрированного драйвера TI максимальная рабочая температура отдельных элементов на плате может достигать 193°С, а у предварительного драйвера этот показатель не превышает 37°С.

Одной из наиболее распространенных схем для коммутации обмоток двигателей является мост типа “H”. Название схемы связано с конфигурацией подключения, которая похожа на букву “H”. Эта электронная схема позволяет легко изменять направление тока в нагрузке и, соответственно, направление вращения ротора. Напряжение, прикладываемое к обмоткам через транзисторы моста, может быть как постоянным, так и модулированным с помощью ШИМ. H-мост предназначен, в первую очередь, для смены полярности питания двигателя – реверса (рисунок 12), но также позволяет тормозить вращение, коротко замыкая выводы обмоток (рисунок 13).

Важнейшей характеристикой силовых элементов моста, в качестве которых сегодня часто используют полевые транзисторы с изолированным затвором, является величина сопротивления открытого канала между истоком и стоком транзистора – RDSON. Значение RDSON во многом определяет тепловые характеристики блока и энергетические потери. С увеличением температуры RDSON также растет, а ток и напряжение на обмотках уменьшаются.
Использование управляющих сигналов с ШИМ позволяет уменьшить пульсации крутящего момента и обеспечить более плавное вращение ротора двигателя. В идеале частота ШИМ должна быть выше 20 кГц, чтобы избежать акустического шума. Но с увеличением частоты растут потери на транзисторах моста в процессе коммутации.
Из-за индуктивных свойств нагрузки в виде обмоток форма тока в ней не соответствует форме подаваемого напряжения ШИМ. После подачи импульса напряжения ток нарастает постепенно,а в паузах ток плавно затухает из-за возникновения в обмотках противо-ЭДС. Наклон кривой на графике тока, амплитуда и частота пульсаций влияют на рабочие характеристики двигателя (пульсации крутящего момента, шум, мощность и так далее).
Для ускоренного затухания в обмотках электродвигателей возбуждаемого эффектом противо-ЭДС тока используют диоды в обратном включении, шунтирующие переходы «сток-исток» транзисторов, либо закорачивают обмотки через переходы «сток-исток» двух транзисторов, одновременно включенных в разных плечах моста. На рисунке 13 представлены три состояния моста: рабочее, быстрого торможения (Fast Decay) и медленного торможения (Slow Decay).
А наиболее эффективным считается комбинированный режим (Mixed Decay), при котором в паузе между рабочими импульсами сначала работают диоды, шунтирующие сток-исток транзисторов, а затем включаются транзисторы в нижних плечах моста.
Решения для управления электродвигателями от TI
Среди полупроводниковых компонентов, выпускаемых компанией TI, представлен обширный ассортимент различных драйверов для управления электродвигателями постоянного тока. Все они требуют минимума внешних компонентов, позволяют создавать компактные решения для управления двигателями с рабочим напряжением до 60 В, отличаются повышенной надежностью, обеспечивают быстрое и простое проектирование систем привода электродвигателями.
Встроенные в драйверы интеллектуальные функции требуют минимальной поддержки внешнего управляющего микроконтроллера (MCU), обеспечивают расширенные коммутационные возможности для обмоток, поддерживают внешние датчики и цифровые контуры управления. Комплекс защитных функций включает ограничение напряжения питания, защиту от превышения тока и короткого замыкания, понижения напряжения и повышения рабочей температуры.
Весь модельный ряд драйверов TI разбит на три раздела: шаговые, коллекторные и бесколлекторные двигателей постоянного тока. В каждом из них на сайте компании действует удобная система подбора по целому ряду параметров. Есть отдельные драйверы, предназначенные для использования с двигателями разных типов.
Драйверы TI для шаговых двигателей
Большой раздел решений TI для управления двигателями включает драйверы для ШД (рисунок 14), которые выпускаются как со встроенными силовыми ключами на основе FET, так и в виде предварительных драйверов, предоставляющих пользователю подбор необходимых силовых ключей. Всего в модельном ряду компании более 35 драйверов для ШД.

TI предлагает широкий выбор наиболее современных решений для управления перемещением и точным позиционированием с использованием микрошаговых схем управления, обеспечивающих электродвигателей плавным перемещением в широком диапазоне напряжения и тока.
Отдельные драйверы, используя один управляющий контроллер, позволяют управлять сразу двумя двигателями, имея для этого четыре встроенных моста на основе FET. Есть драйверы с встроенными FET, например, DRV8834, которые можно подключить для управления к двум обмоткам шагового двигателя или использовать эти же выводы для управления двумя электродвигателями постоянного тока (рисунок 15).

Для более плавного перемещения ротора в драйверах для ШД используется настраиваемый механизм сглаживания импульсов тока (режимы Slow, Fast, Mixed Decay). Система расчета микрошага может быть следующих типов:
- встроенной в драйвер;
- с использованием внешнего опорного сигнала.
Не требуют внешнего контроллера для микрошагового перемещения драйверы , и . Здесь шаг перемещения и алгоритм коммутации обмоток рассчитываются схемой, встроенной в драйвер.
Драйверы TI для BDC
Для управления – коллекторными электродвигателями постоянного тока – предназначено специальное семейство драйверов , ряд представителей которого изображен на рисунке 16. Они обеспечивает полную защиту от превышения напряжения и тока, короткого замыкания и перегрева. Благодаря возможностям интерфейса управления эти драйверы обеспечивают простую и эффективную эксплуатацию двигателей. Пользователи могут с помощью одного чипа управлять одним или несколькими двигателями c рабочим напряжением 1,8…60 В.

Драйверы семейства выпускаются как с интегрированными силовыми ключами, так и как предварительные драйверы. Они требуют минимум дополнительных компонентов, обеспечивают компактность решений, сокращают время разработки и позволяют быстрее выпустить новые продукты на рынок.
Спящий режим (Sleep) позволяет минимизировать потребление энергии в режиме простоя и обеспечивает ускоренную активизацию при запуске двигателя. Для управления скоростью вращения могут использоваться внешние сигналы ШИМ или сигналы PHASE/ENABLE для выбора направления вращения и включения ключей выходного моста.
Имеющий четыре выходных моста драйвер способен управлять двумя ШД или одним ШД и двумя BDC, или же четырьмя BDC, используя при этом управляющий интерфейс SPI.
На рисунке 17 представлена функциональная схема простого драйвера для управления одним коллекторным двигателем.

Драйверы TI для BLDC
Драйверы TI для бесколлекторных двигателей, или BLDC, могут включать интегрированный силовой мост или использовать внешние силовые транзисторы. Схема формирования 3-фазных сигналов управления также может быть внешней или встроенной.
Семейство драйверов для управления бесколлекторными электродвигателями включает модели c разным принципом управления и с различным крутящим моментом. Эти драйверы, обеспечивающие разные уровни шума при управлении BDLС, идеально подойдут для использования в промышленном оборудовании, автомобильных системах и другой технике. Чтобы гарантировать надежную эксплуатацию электродвигателей, драйверы обеспечивают всеобъемлющий набор защит от превышения тока, напряжения и температуры. На рисунке 18 представлены лишь некоторые из 3-фазных драйверов для BLDC в обширном и постоянно пополняющемся модельном ряду компании TI.

Для контроля текущего положения вращающегося ротора могут использоваться внешние датчики разных типов или схема управления с определением позиции ротора по величине противо-ЭДС (Back Electromotive Force, BEMF).
Управление может выполняться с помощью ШИМ, аналоговых сигналов или через стандартные цифровые интерфейсы. Наборы настраиваемых параметров для управления вращением могут храниться во внутренней энергонезависимой памяти.
На рисунке 19 представлен работающий в широком диапазоне температур 40…125°C интеллектуальный драйвер для BLDC со встроенными силовыми ключами на полевых транзисторах, с сопротивлением открытого канала лишь 250 мОм. При диапазоне рабочих напряжений 8…28 В драйвер может обеспечивать номинальный ток 2 А и пиковый ток 3 А.

Драйвер не требует внешнего датчика для контроля положения ротора, но может использовать внешний резистор для контроля потребляемой двигателем мощности. отличается незначительным энергопотреблением, составляющим всего 3 мА, в дежурном режиме. А в модели этот показатель доведен до уровня 180 мкА.
Встроенный интерфейс I2C обеспечивает диагностику и настройку, доступ к регистрам управления работой логической схемы и хранящимся в памяти EEPROM рабочим профилям драйвера.
Расширенный комплект защитных функций обеспечивает остановку двигателя в случае превышения тока и понижения напряжения. Предусмотрено ограничение входного напряжения. Защита по превышению тока работает без использования внешнего резистора. Методы использования защиты настраиваются через специальные регистры.
Заключение
Электродвигатели находят все более широкое применение в самом различном оборудовании, совершенствуются и получают новые возможности во многом благодаря современным системам электропривода.
В ассортименте полупроводниковых компонентов производства компании Texas Instruments широко представлены микросхемы драйверов для управления всеми типами двигателей постоянного тока. На их основе компания предлагает масштабируемые в зависимости от требований по точности, мощности и функциональности решения для создания приводов, работающих в широком диапазоне токов и напряжений, обеспечивающих надежную и удобную эксплуатацию коллекторных, бесколлекторных и шаговых двигателей с полным комплексом защит по току, напряжению и температуре.